
Overhead Crane LiDAR Personnel Detection — Vehicle-Lane Safety Case Study from the Electric Power Industry
DAIDISIKE Field Case Study · Published 2026-05-18 · ~12-min read
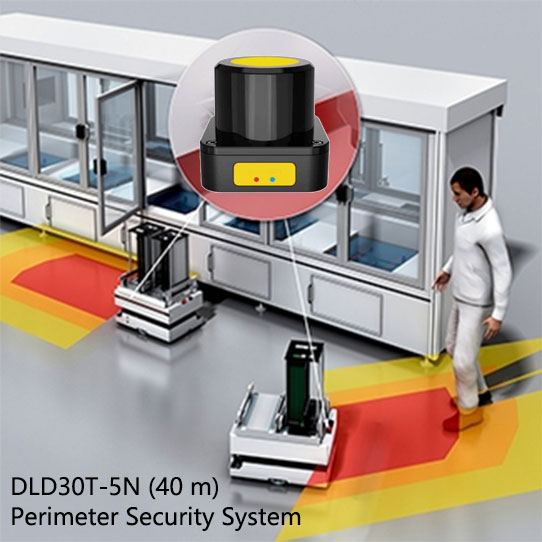
A real DAIDISIKE customer in the electric power industry operates an overhead bridge crane in a plant where the lane directly under the crane doubles as a vehicle and pedestrian route. Light curtains can't cover a moving crane. Fencing blocks the lane. The solution: tilt-mount a 2D LiDAR (DLD30T-5N, 40 m range) on the crane main beam at a 20° downward angle, scan a fan-shaped detection field across the lane below, and wire the LiDAR's dry-contact outputs through a safety relay into the crane control loop. Two zones: outer warning field → slow-down, inner protective field → emergency stop. This article walks through the installation, scan-zone math, wiring, product selection, FAQ, and where the same pattern applies in steel mills, automotive stamping, and port operations.

1. The Problem — Bridge Crane Operations Over an Active Vehicle Lane
The customer is an electric power utility operating a large equipment-maintenance hall inside one of their generation facilities. A 50-ton overhead bridge crane travels the length of the hall to move transformers, switchgear cabinets, and turbine components between maintenance bays. The lane directly below the crane's travel path is the only practical route for forklifts, service vehicles, and technicians to move between the bays.
The three risks that drove this project:
- Personnel entering the lane while the crane is in motion with a suspended load — falling load risk plus the crane's travel can clip head clearance.
- Forklifts and service vehicles crossing the lane just as the crane arrives overhead — vertical and horizontal motion conflict, with the load being the highest-consequence intersecting object.
- Visual blind spots from the crane cabin — the crane operator sits 6+ m above the floor and the load itself often blocks the line of sight to the area immediately below the hook.
Three traditional safety measures were considered and rejected:
| Measure | Why It Fails Here |
|---|---|
| Safety light curtains | Fixed emitter/receiver pairs work for doorways, not for the entire footprint under a moving 50-ton crane. The protected area needs to move with the crane. |
| Physical fencing | Blocks the vehicle lane entirely. The whole reason the lane exists is for vehicles to use it. |
| Visual operator monitoring + audible alarms | Relies entirely on human attention. The crane operator's field of view is obstructed by the load. Audible alarms train people to tune them out. |
What was needed: a detection footprint that travels with the crane, doesn't physically obstruct the lane, and produces a deterministic stop signal regardless of operator attention.
2. The Solution — Tilt-Mounted 2D LiDAR With Two-Zone Interlock
The implemented design uses three principles working together:
- LiDAR mounted on the crane itself — so the detection footprint travels with the crane and always covers the area currently at risk. As the crane moves down the rails, the protected zone moves with it.
- Tilted scan plane (~20° downward) — the LiDAR is angled so its scan plane intersects the floor at a defined radius, creating a fan-shaped protective footprint on the lane below. The tilt keeps the crane's own hook block and chains above the scan plane (no false alarms from the crane).
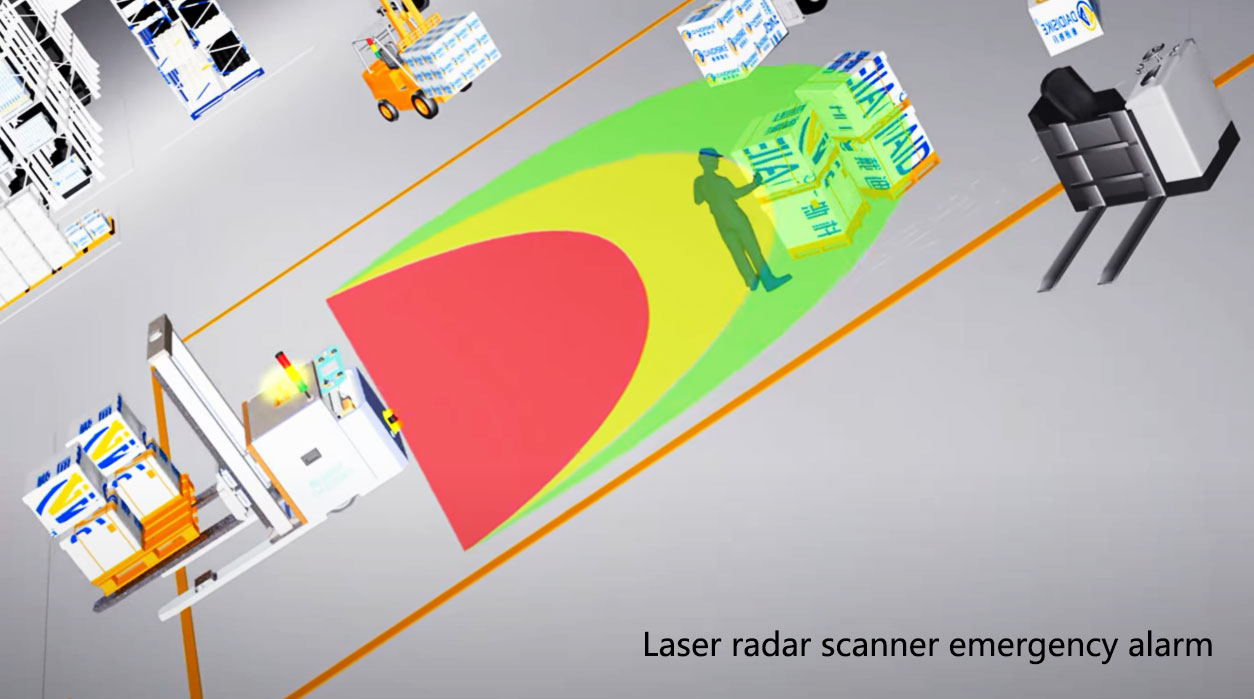
- Two-zone polygon fields with graded response — an outer warning zone triggers slow-down (giving people time to clear), and an inner protective zone triggers immediate stop (the hard floor). This matches the ISO 13855 “warning + protective” pattern used for safety scanners on AGVs.
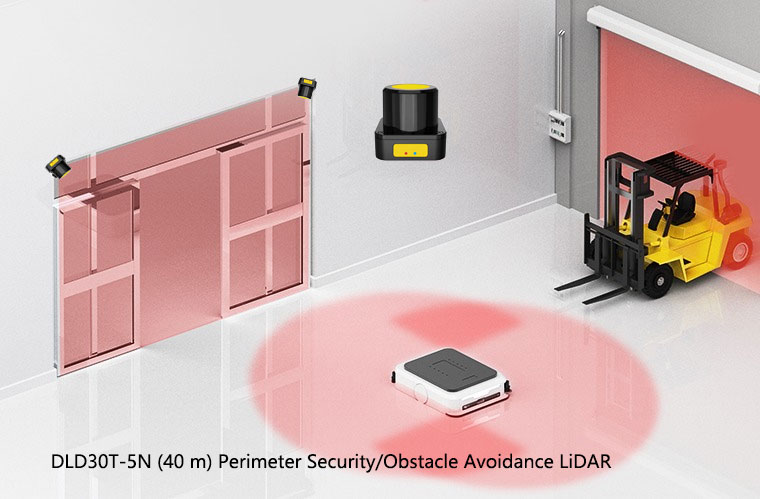
The hardware chosen was the DAIDISIKE DLD30T-5N — a 40-meter industrial obstacle-avoidance LiDAR with 30 Hz scan rate, IP67 housing (essential for dusty industrial halls), 905 nm Class 1 eye-safe laser, RS-485 Modbus digital output, and two configurable discrete outputs for the warning/stop interlock. See the full DAIDISIKE LiDAR scanner family for shorter-range alternatives if your crane is lower.
3. Scan-Zone Geometry — Calculating the Tilt Angle
The relationship between crane height, tilt angle, and detection radius is direct trigonometry. For a LiDAR mounted at height H with downward tilt angle θ from horizontal, the scan plane intersects the floor at a radius:
Router = H × tan(90° − θ + α/2) (far edge of scan field)
where α = LiDAR vertical scan angle (typically 0° for 2D LiDAR, so it's a single line)
For a 2D LiDAR (which scans a single horizontal plane), the math simplifies — the scan plane hits the floor at a single radius:
For the customer's installation (H = 6 m main-beam height, θ = 20° tilt):
So a single 2D LiDAR scanning at 20° tilt from 6 m height covers a ring at a 16.5 m radius from directly below the LiDAR. To get a fan of coverage (not just a ring), the LiDAR is a panoramic scanner that covers 270° of azimuth, producing the characteristic fan-shaped footprint.
| Crane Height H | Tilt θ = 15° | Tilt θ = 20° | Tilt θ = 25° | Tilt θ = 30° |
|---|---|---|---|---|
| 4 m | 14.9 m | 11.0 m | 8.6 m | 6.9 m |
| 6 m | 22.4 m | 16.5 m | 12.9 m | 10.4 m |
| 8 m | 29.9 m | 22.0 m | 17.2 m | 13.9 m |
| 10 m | 37.3 m | 27.5 m | 21.4 m | 17.3 m |
| 12 m | 44.8 m | 33.0 m | 25.7 m | 20.8 m |
Detection radius R = H / tan(θ). Pick the tilt angle so R matches your lane width plus 50–100% safety margin. For most factory bridge cranes (6–12 m height), a 20° tilt gives a 16–33 m radius — plenty for a 3–8 m wide vehicle lane.
4. Installation Walkthrough — 8 Steps from Survey to Acceptance Test
The full installation took the customer's in-house electrical team plus one DAIDISIKE engineer roughly half a day per crane. The steps below match the HowTo schema embedded in this article for AI search engines:
Step 1: Survey the vehicle lane
Measure the lane width, crane travel range, and required detection coverage. Mark where pedestrians and vehicles typically cross. Determine the LiDAR mounting height (crane main beam height) and the required scan radius.
Step 2: Calculate the tilt angle and scan-zone geometry
For a 6-meter crane height covering a 4-meter-wide lane, a 20° downward tilt produces a roughly 12-meter-radius detection fan with the inner edge 2 m from the crane footprint. Adjust tilt between 15° and 25° to match your geometry.
Step 3: Mount the LiDAR on the crane main beam
Bolt the bracket to the underside of the main beam, centered between the two end carriages. Use vibration-dampening washers. Verify the LiDAR is rigidly oriented at the calculated tilt — vibration will eventually loosen a slack mount.
Step 4: Run power and signal cables along the crane
Route 24 VDC power and RS-485 / discrete-output wires through the crane's existing cable festoon to the control cabinet. Use shielded cable bonded to chassis ground at the cabinet end only.
Step 5: Configure the warning and protective fields
Using the LiDAR's configuration software, draw two polygon zones on the scan footprint: an outer warning field (slows the crane to creep speed) and an inner protective field (immediate stop). Typical sizes: warning 8–10 m radius, protective 3–4 m radius.
Step 6: Wire the dry-contact outputs into the crane control loop
The LiDAR's two discrete outputs (DO1 = warning, DO2 = stop) wire through a safety relay (DAIDISIKE DA31 or equivalent) into the crane's hoist-down and travel-enable interlock chain. Maintain the existing E-stop loop integrity.
Step 7: Validate at maximum crane speed
With the crane traveling at maximum speed, walk a test person through the warning field (must trip slow-down within 200 ms) and the protective field (must trip full stop with stop distance verified against ISO 13855). Document the stop test in the safety file.
Step 8: Operator training and signage
Train crane operators on the new warning/stop behavior, the reset procedure after a trip, and the diagnostic LED codes. Install warning signage at vehicle lane entry points: 'LiDAR-monitored area, do not cross when crane is moving'.
5. Interlock Wiring — Tying LiDAR Outputs Into the Crane Control Loop
The DLD30T-5N has two configurable PNP/NPN discrete outputs, used as follows:
| LiDAR Output | Triggered By | Crane Action | Wired To |
|---|---|---|---|
| DO1 — Warning | Object in OUTER zone (8–10 m radius) | Slow to 30% travel speed + audible buzzer | PLC input + audible alarm relay |
| DO2 — Stop | Object in INNER zone (3–4 m radius) | Emergency stop of all crane motion | Safety relay (DA31) → contactor coil loop |
The safety relay (we recommend the DAIDISIKE DA31) sits between the LiDAR's stop output and the crane's motor contactors, providing the dual-channel monitoring + EDM (external device monitoring) feedback required for an ISO 13849 Cat 3 architecture. The existing E-stop circuit stays intact — the LiDAR adds another path that can drop the contactors, it doesn't replace any existing safety function.
For installations that need event logging or remote monitoring, the LiDAR's RS-485 Modbus channel exposes the breach event with timestamp + zone ID. Wire it to the plant SCADA or to a small data-logger like a Raspberry Pi industrial gateway — useful for after-incident reviews and OEE statistics on how often the crane is slowed/stopped by the system.
6. Hardware Recommendation
DAIDISIKE DLD30T-5N (40-meter range)
- Detection range: 40 m @ 70% reflectivity, 8 m @ 10% reflectivity, 4 m even under 20 K lux daylight
- Scan rate: 30 Hz (sub-35 ms response time) — fast enough for personnel walking into the zone at full speed
- Eye safety: 905 nm Class 1 (IEC 60825-1) — no warning labels, no laser interlock area required
- Ingress: IP67 — survives dusty maintenance halls, oil mist, occasional washdown
- Outputs: 2 configurable PNP/NPN discrete + RS-485 Modbus for warning/stop logic and SCADA logging
- Mounting size: 55 × 55 × 51 mm, 85 g — small enough to clamp under any crane main beam
- Operating temp: -25 °C to +60 °C — handles unheated maintenance halls in winter
Shorter-range alternatives for lower cranes: the DLD05A3-3N / DLD20A5-5N (5 m / 20 m) for jib cranes and small bridge cranes; the 5JPTG / 10JPTG (5 m / 10 m) for ultra-compact installations.
7. Where This Same Pattern Applies — Beyond Electric Power
The customer in this case study is in the electric power industry, but the underlying safety pattern — moving overhead equipment + shared ground-level traffic area — appears in many other industries where the same LiDAR + tilt-mount + interlock configuration applies with minimal modification:
Steel Mills
Bridge cranes moving ladles of molten steel above the rolling mill floor. Slag splash and high ambient temperature make IP67 + extended temperature range critical.
Automotive Stamping
Plant overhead cranes moving die sets between presses while forklifts cycle steel coils underneath. Tilt-mounted LiDAR keeps die-change traffic safe without halting press operations.
Container Ports
Quay cranes and rubber-tired gantry (RTG) cranes operating above container-yard truck lanes. Higher mounting (15+ m) calls for the 40 m DLD30T-5N range.
Aerospace Manufacturing
Overhead cranes moving fuselage sections and wing assemblies. Strict FAA / EASA safety documentation requirements — the deterministic LiDAR + safety relay architecture documents cleanly.
Wind Turbine Component Assembly
Cranes moving multi-ton blade and nacelle components. Long bays mean long crane travel paths intersecting multiple staging zones.
Shipyards
Goliath gantry cranes moving ship-block sections. Outdoor environment + corrosion + tidal vibration — IP67 + 905 nm Class 1 laser are well-suited.
8. Results After 12 Months in Service
- Zero personnel-crane near-miss incidents in the protected hall during the first year — compared to 3 logged near-misses in the prior 12 months.
- ~ 4% of crane cycles trigger a warning-zone slow-down. This is the system catching real risk events (forklift entering as crane arrives, worker crossing without looking), not false alarms.
- ~ 0.3% of crane cycles trigger a protective-zone hard stop — far below the threshold where operators would be tempted to bypass the system.
- No false trips from environmental noise — the customer's plant has welding operations and forklift exhaust haze, neither of which has triggered spurious LiDAR detections.
- Installation cost ~ $1,500 per crane (one DLD30T-5N + DA31 safety relay + cabling + 4 hours of labor). Payback in avoided downtime + insurance premium negotiation was under 18 months.
- The customer is rolling out the same configuration to 7 more cranes across two sister facilities.
9. Frequently Asked Questions
Why use LiDAR for crane personnel detection instead of safety light curtains or fencing?
Safety light curtains require a fixed emitter-receiver pair on opposite sides of a doorway-sized opening — they don't work when the protected area is the entire footprint under a moving crane. Physical fencing blocks the vehicle lane entirely, which defeats its purpose. A tilt-mounted LiDAR scans a fan-shaped zone that moves with the crane, dynamically protecting whichever part of the lane is currently under the hoist. This is the only configuration that allows the lane to remain operational while keeping crane operations safe.
What detection range and resolution do I need for an overhead crane application?
For most factory bridge cranes (6–15 m main beam height covering a 3–8 m vehicle lane), the DAIDISIKE DLD30T-5N's 40 m range with 30 Hz scan rate is the sweet spot — plenty of range margin for misalignment, fast enough to react to fast-moving personnel. Resolution requirements come from the smallest target you need to detect: 50 mm minimum detectable size (MDS) catches a person standing upright; 30 mm MDS catches a person crouching or a forklift mast.
How do I integrate the LiDAR outputs with the existing crane control system?
The LiDAR provides two dry-contact discrete outputs by default: one for the outer warning field (slow-down command) and one for the inner protective field (emergency stop). Wire these through a safety relay (DAIDISIKE DA31 series) into the crane's existing travel-enable and hoist-down interlock chain — they go in series with the E-stop circuit, so a LiDAR trip de-energizes the contactors the same way an E-stop button does. RS-485 Modbus is also available if you want to log breach events to a SCADA system or your plant historian.
What about false alarms from the crane's own moving parts — chains, hook block, hoisted load?
Two layers of mitigation. First, draw the protective field as a polygon that excludes the area directly below the hoist hook — the LiDAR's configuration software lets you carve out arbitrary shapes. Second, the tilt angle (20° typical) is calculated so the scan plane passes a defined distance below the crane footprint, meaning the chain and hook block fall above the scan plane and never enter detection. If the hoist lowers a load into the scanned area, that's exactly when you DO want the LiDAR to stop crane travel — it's the same hazard as a person standing there.
Does this configuration meet ISO 13849 / IEC 61496 safety standards?
The DLD30T-5N alone is an obstacle-avoidance LiDAR, not a safety-rated (Type 3 ESPE) device. For a SAFETY-rated installation (PL d / SIL 2 or higher), pair it with a safety relay (DAIDISIKE DA31, rated PL e) handling the interlock logic, and document the architecture under ISO 13849-1 Cat 3 with dual-channel monitoring. For applications where the risk assessment classifies the function as PL c or below (which many secondary-warning systems do), the LiDAR + standard relay configuration is sufficient. Always perform a documented risk assessment to determine which category applies.
What happens during a power loss or LiDAR fault?
Both LiDAR outputs are wired in fail-safe mode: the outputs are ON during normal operation (crane allowed to move) and switch OFF on detection OR on fault. A LiDAR power loss, cable disconnect, or internal self-test failure all cause the contacts to open, which de-energizes the crane control loop — the crane stops. This is the same fail-safe principle as a Type 4 light curtain.
Can this same approach work for other crane applications — gantry cranes, jib cranes, port quay cranes?
Yes, with adjustments to the mounting geometry. Gantry cranes (rails on the ground, structure overhead) use the same configuration as the bridge crane example here. Jib cranes can mount the LiDAR on the boom tip, scanning a swept arc as the boom rotates. Port quay cranes use higher-range LiDARs (50+ m) and often combine multiple units to cover the full container-yard footprint. The core principle — tilt-mounted scanning, polygon protective fields, fail-safe dry-contact outputs into the crane interlock — applies across all configurations.
10. Related Reading
DAIDISIKE LiDAR Scanner Category Overview
Full product family from 5 m short-range to 50 m long-range with selection guide.
DLD30T-5N Product Page
Specs, dimensions, technical drawings, and ordering details for the LiDAR used in this case study.
Safety Scanner vs Industrial LiDAR
When to pick a safety-rated scanner vs an obstacle-avoidance LiDAR for mobile and overhead applications.
Anti-Collision Laser Scanner Setup Guide
Step-by-step configuration of warning + protective zones for factory floor applications.
DA31 Safety Relay Module
The companion safety relay that handles dual-channel monitoring and EDM feedback in this installation.
More Solution Case Studies
Customer applications across safety light curtains, LiDAR, infrared detectors, and door locks.
Have a Similar Crane Safety Application?
Tell us your crane height, lane width, and ambient conditions — DAIDISIKE engineering will reply within 24 hours with a specific scan-zone geometry, the right LiDAR model, and a complete bill of materials including the safety relay and cabling. We can also send sample reference drawings from this case study under NDA.
Contact DAIDISIKE Engineering →