
A safety engineer at an automotive plant put it bluntly last quarter: “The humanoid is the easiest robot we’ve ever commissioned, because we treated it like the hardest. Fence, curtain, scanner, mat, interlocks, the lot. The clever bits stay inside the fence.” That sentiment, more than any datasheet, is the honest summary of where humanoid robot safety stands in 2026.
The last eighteen months have been the moment humanoids moved from demonstration footage to repeatable industrial work. They are not everywhere, the tasks are narrow, and the deployments are fenced — but they are real. That gap, between what is technically deployed and what the public images suggest, is where most safety conversations go wrong. This article walks the gap.
What actually shipped: the 2025-2026 production deployments
Before any talk of standards, it is worth being specific about which humanoids have actually done industrial work, because the field is full of staged demos and the regulatory picture only makes sense in light of the real deployments.
- Figure 02 at BMW Group Plant Spartanburg. A roughly ten-month deployment that concluded in late 2025. Figure 02 retrieved and positioned sheet-metal parts for body-shop welding on the X3 line, ran five days a week for ten-hour shifts, moved over 90,000 components across about 1,250 operating hours, and contributed to more than 30,000 vehicles. The pilot has ended; BMW has since announced a second pilot in Plant Leipzig and a Center of Competence for Physical AI in production.
- Apptronik Apollo at Mercedes-Benz. Apollo is in pilot operation at the Mercedes-Benz Digital Factory Campus in Berlin-Marienfelde and at a Hungarian plant, performing component transport to the line and early-stage quality checks. Mercedes has since taken an equity stake in Apptronik. Tasks remain narrow and the cells are safeguarded.
- Agility Digit at GXO Logistics (SPANX). The first publicly announced multi-year, Robots-as-a-Service commercial deployment of a humanoid. Digit moves totes from collaborative robots onto conveyors at the SPANX fulfilment site and passed the 100,000-tote operational milestone in late 2025. It works alongside AMRs inside a defined work zone.
- Tesla Optimus, Unitree, and others. Tesla has shown Optimus units inside its own Fremont and Gigafactory areas for internal materials-handling tasks; Unitree H1 / G1 / H2 units have been deployed in supplier and research environments. None of these to our knowledge have published a verified, audited production deployment of the scale of the three above.
Notice what every confirmed deployment has in common. The robot works inside a defined cell or zone. It is not strolling unsupervised across the broader factory floor among non-trained personnel. That choice is not a marketing oversight — it is the only configuration the current safety standards can actually support.
What ISO 10218:2025 says — and does not say — about bipeds
The major 2025 revision of ISO 10218 (Parts 1 and 2) was the first structural rewrite of the industrial robot safety standard since 2011. Three changes matter for humanoids:
1. Mobile platforms are no longer entirely excluded. The previous edition explicitly excluded robots whose manipulator was mounted on a mobile platform from the scope of ISO 10218. The 2025 revision relaxes that exclusion: the manipulator portion of a mobile manipulator — including a humanoid — can fall within ISO 10218 if the requirements are met. The standard still defers the mobility behaviour itself (driving, walking, balancing) to ISO 3691-4 for driverless industrial trucks, and to ANSI/RIA R15.08 for industrial mobile robots in North America.
2. ISO/TS 15066 has been absorbed into ISO 10218-2:2025. The former technical specification on collaborative robot applications — including the biomechanical pain-and-injury limits that underpin power-and-force-limited (PFL) operation — is no longer a separate document. Its content is now normative inside ISO 10218-2:2025. The terminology shifted from “collaborative robot” to “collaborative application,” reflecting that safety depends on how the robot is used, not what label is on the box.
3. Cybersecurity is in scope. The 2025 revision adds explicit cybersecurity requirements for the robot controller and its connections. This is relevant to humanoids because almost every commercial humanoid runs cloud-connected AI for skill updates, and a network surface is now treated as a safety-relevant attribute.
What the standard still does not do is provide a biomechanical injury model for a falling, stumbling, or balancing biped, or a test method for a humanoid’s stop-on-fault behaviour while balancing. Those gaps are not oversights — they are real research questions. ISO 13482 covers personal-care and service robots, including humanoids in non-industrial settings, but it is not the standard a factory integrator will be audited against. The result, in 2026, is that the integrator stitches scopes together: ISO 10218-1/2:2025 for the manipulator and end-effector, ISO 3691-4 or R15.08 for the mobility platform, ISO 12100 for the overall risk assessment, ISO 13849-1 or IEC 62061 for the safety functions, and IEC 61496-1/2/3 for the electro-sensitive protective devices themselves.
Why fenced cells are still doing the real safety work
A reasonable question from outside the safety profession is: if collaborative operation works for cobots — if a UR or a Doosan can share a bench with a person under PFL rules — why can’t a humanoid? The answer is geometric and dynamic, not ideological.
PFL works on a manipulator because the manipulator’s dynamics, inertias, payload, and contact geometry are bounded and characterised. The biomechanical limits in ISO 10218-2:2025 are derived against contact between specific body regions and a manipulator end-effector or link with known mass and known velocity. A 60-80 kg biped that can lose footing, drop a payload, step into a new pose to recover balance, or topple from a standing posture is a different contact problem entirely. The injury energy in a humanoid falling onto a person is dominated by gravity, not by motor torque, and no validated PFL-equivalent biomechanical model yet exists for that case.
So integrators do what good integrators always do when the higher tier of safeguarding is not yet validated: they fall back to the tier that is. That tier is the conventional perimeter-safeguarded robot cell, and it is the configuration every confirmed humanoid deployment uses.
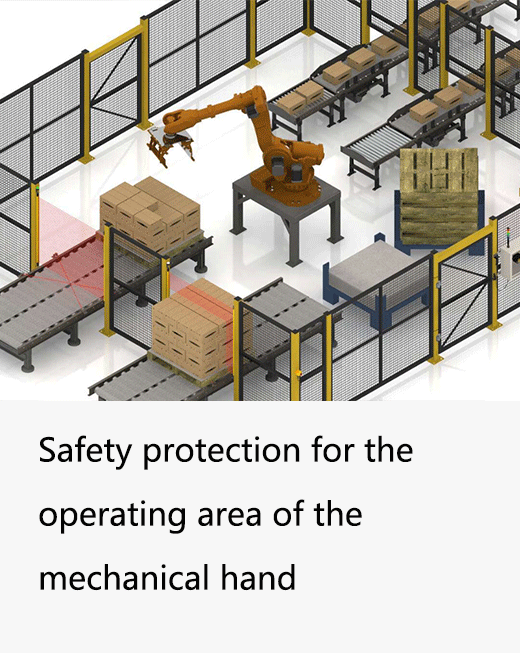
The safeguarding layers in a 2026 humanoid workcell
Walk through how a typical humanoid cell is actually built today, and the resemblance to a conventional robotic cell is the point.
1. Perimeter fencing and interlocked access
The cell boundary is a physical fence or guard with one or two controlled access points. The access doors carry coded safety interlock switches with guard locking, so the door cannot open while the humanoid is in motion, and the cell cannot be commanded to run while the door is open. This is the most boring layer and the one that does the most safety work. For high-energy or slow-coast situations, guard locking that holds the door until the robot has reached a verified safe state is mandatory under ISO 14119 — not a nice-to-have.
2. Light curtains at the human interface
Where an operator needs to load parts, hand off tooling, or inspect the cell, an opening in the fence is guarded by a Type 4 / PL e / SIL 3 safety light curtain. Resolution is chosen by what the curtain has to detect: 30-40 mm for body or access detection on a walk-up opening, 14-20 mm at a point-of-operation where hands enter. Muting is used on conveyor pass-throughs so that parts flow without tripping the curtain, but the muting geometry is set up so that a person cannot shadow a pallet through.
3. Area scanners covering the floor
A humanoid moves around its workcell. That movement makes flat, plane-style safeguarding insufficient: you need to know whether a person is in the floor zone the robot might step into, not just whether they have crossed a defined boundary. A safety laser scanner certified to IEC 61496-3 covers an area, with multiple field sets switched by cell state: a larger protective field during free motion, a tighter one when the robot is at a stationary station. Same principle as an AGV, different mounting. For larger cells or irregular footprints, an area-type light curtain such as the DAIDISIKE DQSA series can complement the floor scanner by covering vertical detection.
4. Pressure-sensitive mats and edge devices
For dead zones behind fixtures or under benches where a scanner cannot see, a safety mat or sensitive edge fills the gap. These older technologies are unfashionable but completely valid; ISO 13856-1 and -2 still apply.
5. The humanoid’s own perception — as a non-safety layer
Every commercial humanoid has internal current and torque monitoring, on-board cameras, on-board LiDAR or depth cameras, and a balance controller. These are useful and they make the robot better behaved. They are not, in 2026, certified safety devices in the IEC 61496 sense, and they do not appear in the safety function’s PL or SIL calculation. They sit on top of the perimeter safeguards as a behavioural improvement, not in place of them. Treating an on-board perception LiDAR as a safety device is the same category error that catches AGV integrators — and the same risk-assessment failure.
Conventional safeguards vs humanoid-specific gaps
| Safeguard layer | Maturity for humanoids in 2026 | Standard the integrator cites |
|---|---|---|
| Perimeter fence + interlocked guard locking | Mature — identical to a conventional robot cell | ISO 14119, ISO 13857 |
| Safety light curtain at operator opening | Mature — Type 4 / PL e / SIL 3 readily available | IEC 61496-1/2, ISO 13855 |
| Safety laser scanner on the floor zone | Mature — precedent is AGV/AMR safeguarding | IEC 61496-3, ISO 3691-4, ANSI R15.08 |
| Pressure-sensitive mat / sensitive edge | Mature for dead-zone coverage | ISO 13856-1/2 |
| PFL collaborative operation (whole biped) | Not yet — no validated biomechanical model for a falling humanoid | ISO 10218-2:2025 (manipulator portion only) |
| Humanoid’s own cameras / LiDAR as safety function | Not yet — useful behavioural layer, not certified | No applicable certification path today |
| Safety of the AI / motion-planning stack | Open research — cybersecurity in scope under ISO 10218-1:2025, but probabilistic behaviour is not a deterministic safety function | ISO 10218-1:2025 (partial), ISO/IEC 27001 for the network surface |
The pattern is consistent: the mature, conventional safeguards carry the safety case, and the new, humanoid-specific capabilities are layered on as productivity and behaviour improvements rather than as protective devices. That allocation of responsibility is what allows a competent integrator to sign off the cell at all.

What is honestly still unsolved
A practical article should not finish without naming the gaps. Three of them are worth tracking.
Biomechanical injury model for a falling biped. The PFL limits in ISO 10218-2:2025 were derived from quasi-static and transient contact studies between manipulator links and specific body regions. A whole humanoid losing balance and falling forward onto a kneeling worker is not the same contact mechanics. Until a research consortium produces validated test methods for this case — analogous to what ISO/TS 15066 did for cobot contact — PFL operation for a biped will not be credible.
Stop-on-fault while balancing. A wheeled AMR can execute a safe stop by cutting motor power; a biped cannot. A power-off humanoid falls over. So ‘safe stop’ for a biped means something different — reaching a stable braced posture, or controlled descent — and there is no consensus test method for verifying that behaviour under fault. ISO 10218 is not silent on safe stop categories, but the test rig for a biped version of those categories does not yet exist as an industry standard.
Safety of probabilistic AI behaviour. The motion-planning, manipulation, and locomotion policies on a modern humanoid are learned, often updated over the air, and probabilistic in their output. A safety function under ISO 13849-1 is, by contrast, deterministic and bounded. The honest answer in 2026 is that the AI layer is not currently inside the safety function. ISO 10218-1:2025 added cybersecurity requirements, which is the start of bringing the network surface into scope, but the treatment of learned behaviour as a safety-relevant artefact is still an active research area in the IEEE robotics standards working groups and in the A3 R15.06-related working groups in North America.
Where DAIDISIKE fits — honestly
The market noise around humanoids has produced a great deal of inbound interest in ‘humanoid-rated’ safety sensors, which do not exist as a product category — and we think will not, because the gap is not in the protective device, it is in the standards above it. What does exist is a well-tested family of safeguards that the confirmed deployments at BMW, Mercedes-Benz and GXO all use in some combination.
Within that picture, DAIDISIKE’s contribution is the conventional perimeter layer. The DQSA area-type light curtain fits the walk-in operator interface of a humanoid cell; the DQA Type 4 / PL e / SIL 3 family covers point-of-operation openings; the DLD-series safety laser scanners (DLD05A3, DLD20A5, DLD30T-5N) cover the floor zone with the same architecture they use on AGV and AMR fleets — which remains, in 2026, the closest practical precedent for what a humanoid cell actually needs.
What we will not tell you is that any of our products turn a humanoid into a collaborative robot in the PFL sense. They do not, because nothing on the market does. What they do is let you build the perimeter-safeguarded cell that the standards currently require — the same cell every confirmed deployment uses.
The bottom line
Humanoids on the factory floor are real in 2026, and they will become more common. They are also, today, safeguarded almost identically to a conventional industrial robot, because that is the only configuration the current standards and validated test methods can actually support. ISO 10218:2025 has opened the door to bipeds within the manipulator scope and has absorbed ISO/TS 15066, which is genuine progress, but the gaps around biomechanical contact, stop-on-fault behaviour while balancing, and probabilistic AI safety are real and they are not closed.
The integrator’s job, then, is the same as ever: do the risk assessment honestly, build the layers the standards require, and resist the temptation to let marketing footage define the safeguarding strategy. The humanoid is impressive. The fence, the curtain, and the scanner are what let you ship it.
Related reading
Robot Cell Safety in 2026: ISO 10218:2025
What the major 2025 revision changed for industrial robot cells — cybersecurity, collaborative applications, and PFL integration.
DAIDISIKE DQSA Area Light Curtain
Area-type light curtain for whole-body detection around larger robot envelopes and walk-in workcells.
AGV & AMR Safety Laser Scanners
How certified safety scanners protect mobile robots — the closest precedent for safeguarding a walking humanoid.