
A planning engineer at a packaging OEM put the question to us last quarter the way it usually arrives: “Our integrator is recommending we swap the perimeter curtains around the cobot for a 3D safety camera. The pitch sounds great. Is it actually right?” The honest answer in that case was: half. The camera was the right call inside the cobot envelope, where the hazard had a complicated shape. It was the wrong call at the conveyor opening where parts pass through. The cell now uses both. That is the conversation this article is built around.
The two product classes, briefly
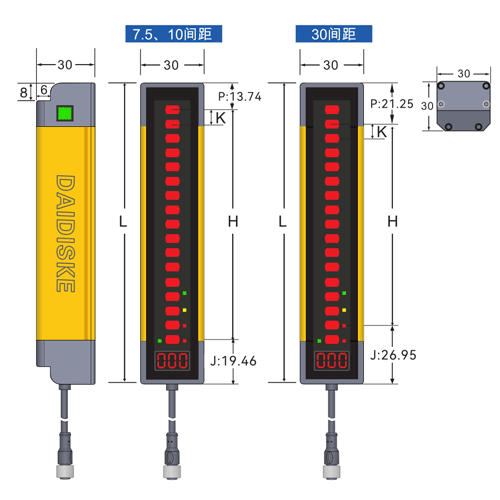
A safety light curtain is an active opto-electronic protective device (AOPD) covered by IEC 61496-1 and IEC 61496-2. A transmitter sends an array of modulated infrared beams across a fixed plane; a receiver confirms each beam every cycle; an obstruction switches the safety outputs. The technology is simple, mature, and very fast. A Type 4 curtain typically supports PL e / SIL 3 and runs response times in the 10–20 millisecond range. DAIDISIKE’s DQT4 and DQA families fit this description.
A vision-based protective device (VBPD) is the camera class. It sits under IEC 61496-4 in its own multi-part structure: IEC 61496-4-1 sets the general requirements for any camera-based ESPE; IEC TS 61496-4-2 adds the rules for reference-pattern (image-processing) techniques; IEC TS 61496-4-3, published in 2022, covers stereo-vision techniques (VBPDST) specifically. Two physical implementations dominate the market today:
- 3D time-of-flight (ToF). A single sensor illuminates the scene with modulated infrared light and measures the round-trip time at each pixel to produce a depth image. The SICK safeVisionary2 is the established commercial example — 512×424 depth pixels, a 68°×42° field of view, 30 Hz frame rate, response time from approximately 55 ms, with up to 24 configurable fields and certification to PL c.
- Stereo vision. Two or three passive cameras triangulate depth from disparity. Pilz SafetyEYE is the archetype: a multi-camera sensing head feeding a separate analysis unit, monitoring up to roughly 72 m² from a 4 m install height, requiring a minimum scene illumination from around 300 lux and rated to Cat. 3 / PL d / SIL 2.
Both classes are real ESPE, both can be integrated into a safety function with a defined Performance Level, and both are fundamentally different from a flat light curtain in what they can monitor.
What the camera actually sees
A light curtain monitors a plane. A 3D safety camera monitors a volume, and that distinction is the entire reason this category exists. Inside that volume you can carve multiple protective and warning fields with almost arbitrary shapes — an L-shaped operator zone, a stepped envelope around a robot reach, a tiered approach into a press where slowdown begins at two metres and stop is enforced at half a metre. None of that is expressible in flat-plane optics.
The cost of that flexibility is that the camera is now inferring depth from a noisy signal, not breaking a hard beam. That changes everything that follows: response time, lighting dependence, detection capability, and the achievable Performance Level.

The honest side-by-side
Here is what the comparison looks like with the rhetoric removed. We have included a safety laser scanner column because in practice the three devices compete more often than the two-device pitch suggests.
| Characteristic | Type 4 light curtain | Safety laser scanner | 3D ToF safety camera |
|---|---|---|---|
| Standard | IEC 61496-1 / -2 (AOPD) | IEC 61496-1 / -3 (AOPDDR) | IEC 61496-1 / TS 61496-4-1 / -4-3 (VBPD) |
| Geometry monitored | Flat plane | Horizontal 2D floor zone | True 3D volume |
| Typical response time | ~10–20 ms | ~60–120 ms | From ~55 ms, longer with multi-sampling |
| Achievable PL / SIL | PL e / SIL 3 (Type 4) | PL d / SIL 2 typical | PL c (ToF, current gen); PL d (stereo, SafetyEYE) |
| Detection capability | From 14 mm (finger) | From ~30–70 mm (leg/body) | Configurable hand 20 mm / arm 40 mm / leg 50 mm / body 200 mm |
| Range | Up to ~20 m beam length | Up to ~40 m protective; ~70 m warning | Protective ~2 m; warning ~7 m (safeVisionary2) |
| Ambient lighting | Insensitive (modulated IR) | Insensitive (active IR) | ToF: active IR, indoor only. Stereo: needs ~300 lux scene light |
| Hardware footprint | Transmitter + receiver pair | Single scanner head | Camera head; stereo needs analysis unit |
| Relative cost | Baseline | ~3–5× baseline | ~5–10× baseline |
Two numbers in that table do the most work. Response time sets the safety distance through ISO 13855, and on a fast hazard it is decisive: a 55 ms camera response cannot be mounted as close to a press as a 14 ms curtain. The achievable Performance Level sets where the device can legally sit: a PL c device cannot be the sole layer in a function whose risk assessment demands PL d or PL e.
Where the camera wins
1. Collaborative robot speed-and-separation monitoring
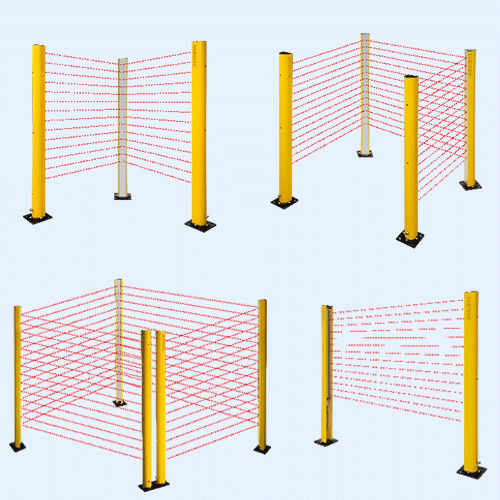
Speed-and-separation monitoring (SSM) under ISO/TS 15066 wants the robot to slow as a person approaches and stop only if they enter the immediate safety zone. That envelope is shaped like the robot — not like a wall. A 3D ToF camera mounted above the workspace can carve nested protective and warning zones that match the robot’s reach and the operator’s approach. A flat curtain can only describe a wall around the cell; the cell then has to be larger than it needs to be, and the throughput penalty is real.
2. Walk-in cells with complex geometry
A welding cell with an L-shaped operator station, a bench at one elevation and a fixture at another, an AGV docking face that is sometimes a wall and sometimes an opening — these all want a volumetric protection profile. A 3D safety camera can describe such a shape in software; reproducing the same coverage with curtains and scanners often takes three or four devices, more cabling and more configuration risk.
3. Press and machine approach where slowdown matters
On a press where the goal is to slow the operator’s approach before they reach the danger zone, a tiered warning field at two metres and a protective field at half a metre is a real productivity feature. A flat curtain stops the press when crossed. A camera can stage the response. That said, the press itself usually still needs a finger-detection light curtain at the point of operation — the camera supplements it, not replaces it.
Where the curtain still wins
1. Defined access openings
A guarded cell with a rectangular door or pass-through is a textbook light-curtain job. Two posts, an alignment check, a safety relay and you are done — PL e, sub-20 ms response, a fraction of the cost of any camera solution. There is no engineering reason to reach for vision-based safety here, and we say so to customers asking about it. Our DQA series and the higher-resolution DQE family cover this case directly.
2. Fast hazards needing finger resolution
A power press, a punch, a shear, anything where ISO 13855 calculates a safety distance dominated by response time and 14 mm finger detection is required, is out of reach for the current generation of 3D safety cameras. The response time gap is structural — ToF measurement, multiple sampling for immunity and the inherent frame rate all add latency. The curtain is the right device, and probably will be for another generation of vision hardware.
3. PL e / SIL 3 safety functions
If your risk assessment demands PL e, a PL c 3D ToF camera is not, by itself, sufficient. Stereo-vision systems like SafetyEYE reach PL d, which is enough for many cobot cells but still below the highest tier. Combine the camera with a Type 4 light curtain on the immediate hazard if you need the higher rating, or stay with curtain + scanner architectures that already deliver PL e.
4. Harsh, dusty or outdoor environments
Vision-based safety is an indoor proposition. Sunlight, weld flash, dust, condensation and reflective gloss surfaces all degrade depth measurement. Light curtains tolerate most of these conditions; long-range outdoor perimeter scanners are a separate category again. We cover the scanner side in our industrial LiDAR scanner buyer’s guide.
A clean decision flow
We use the same four-step check whenever this question comes up on a real cell:
- Is the hazard a flat opening or a 3D volume? Flat opening → light curtain. Volume → continue.
- What Performance Level does the risk assessment require? PL e at the point of operation → light curtain (with a camera optionally added for the approach zone). PL d or below → stereo vision or ToF camera is in scope.
- How fast is the hazard? Sub-20 ms response required by ISO 13855 → light curtain. Slower collaborative or supervised hazard → camera is viable.
- What does the environment look like? Dust, sunlight, weld flash, gloss surfaces, uncontrolled lighting → curtain or scanner. Clean indoor cell with controlled lighting → camera will perform.
Run that flow honestly and the answer for most cells is both: a flat-plane device on the access opening and the point of operation, a 3D camera on the volumetric approach zone where geometry matters. The two technologies are complementary, not competitive — which is exactly the message the industrial safety-camera vendors quietly say once you get past the brochure.
Where DAIDISIKE fits — honestly
DAIDISIKE builds safety light curtains and safety laser scanners. We do not currently make a 3D ToF safety camera, and we will not pretend otherwise. What we do is supply the flat-plane and 2D area devices that sit alongside a 3D camera in a well-designed cell: the DQT4 Type 4 light curtain for access openings and point-of-operation, the DQSA area protection for larger flat zones, the DLD-series safety scanners for horizontal floor protection, and the DA31 safety relay for chain evaluation. If a customer needs 3D vision-based safety for a cobot cell, we will say so — and we will scope the curtain and scanner architecture around it so the safety chain actually delivers the Performance Level the risk assessment requires.
The bottom line
3D ToF safety cameras and stereo-vision systems are not marketing fluff. They are a real, certified addition to the ESPE family under IEC 61496-4, and on the cells where geometry is the binding constraint they earn their keep. They are also slower, costlier, more environmentally sensitive and currently lower in achievable Performance Level than a Type 4 light curtain. Treat them as the new tool on the bench, not the replacement for the older ones. The engineer who chooses honestly between curtain, scanner and 3D camera — and combines them where the cell calls for it — will build a safer line than the one who picks the newest acronym.
Related reading
Light Curtain vs Scanner for Robot Cells
Perimeter access detection vs area protection on robot cells — when to pick which.
Future of AI-Integrated Safety Sensors
Where intelligent vision and machine learning fit (and don't) inside certified safety.
How to Choose an Industrial LiDAR Scanner
Safety vs navigation LiDAR, range and protective fields for AGV and perimeter use.