
DLD05A3-3N / DLD20A5-5N — лазерный радар обхода препятствий 5 м/20 м

Превращая «зрение мира» в инженерную возможность, LiDAR прошёл более полувека — от исследовательских прототипов до незаменимых датчиков для промышленной автоматизации, навигации AGV/AMR, обхода препятствий роботами, охраны периметра и зональной защиты. Эта хронология объясняет, как технология пришла к нынешнему состоянию, и отвечает на практический вопрос, который больше всего волнует покупателей и операторов: сможет ли она стабильно работать на линии?
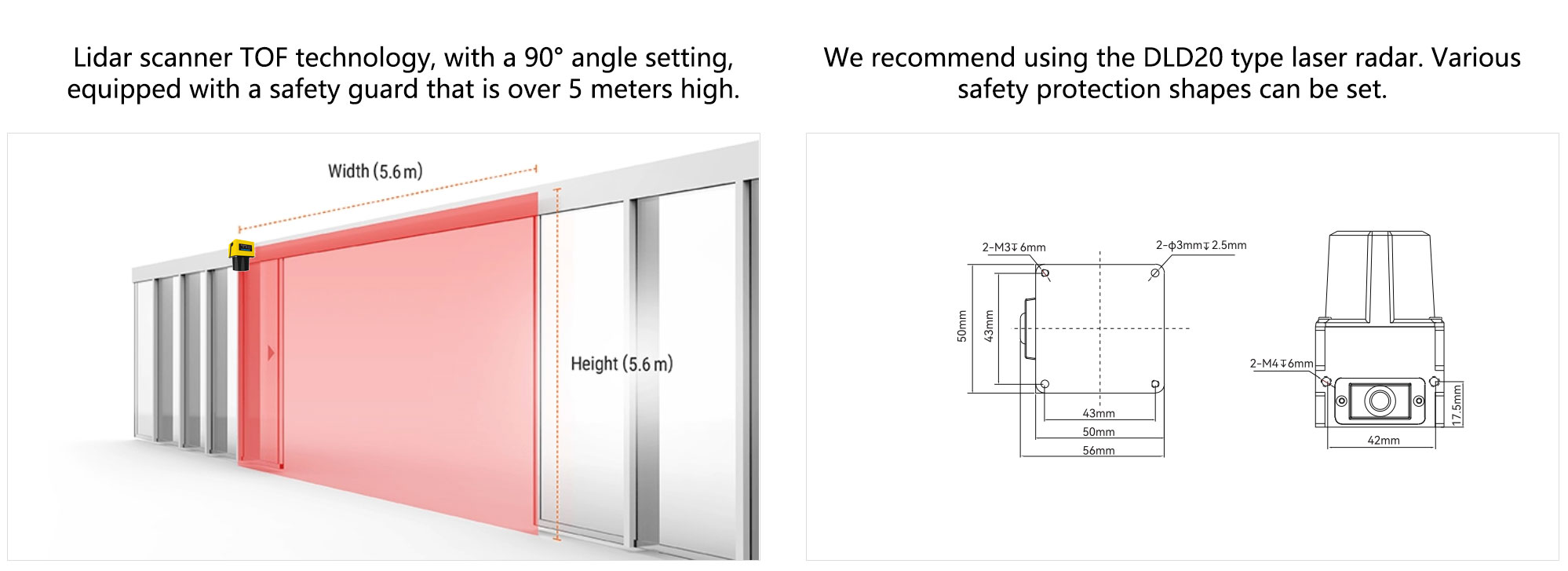
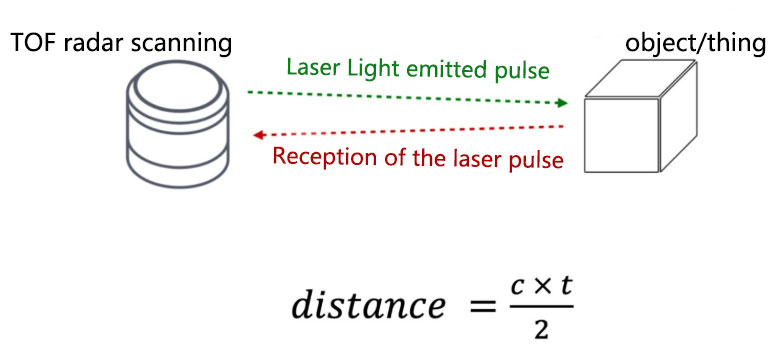
Время пролёта (TOF) сделало оптическую дальнометрию практичной: излучить лазерный импульс, измерить время прохождения туда-обратно Δt и оценить расстояние как c·Δt/2. Ранние приборы были громоздкими и энергоёмкими, в основном для оборонных и научных задач. Сформировались ключевые элементы — полупроводниковые лазеры, фотодетекторы (APD/SiPM) и формирование импульсов. Чтобы превратить точечные измерения в сканы, инженеры разработали повторяемые оптические механизмы: вращающиеся зеркала, гальваносканеры и полигональные сканеры.
Базис безопасности: продукция соответствует IEC 60825-1 по лазерной безопасности для глаз; большинство промышленных LiDAR ориентированы на Class 1.
Ключевые слова: лазерная дальнометрия, TOF, импульсный лазер, сканирование вращающимся зеркалом, фотодетектирование, IEC 60825-1
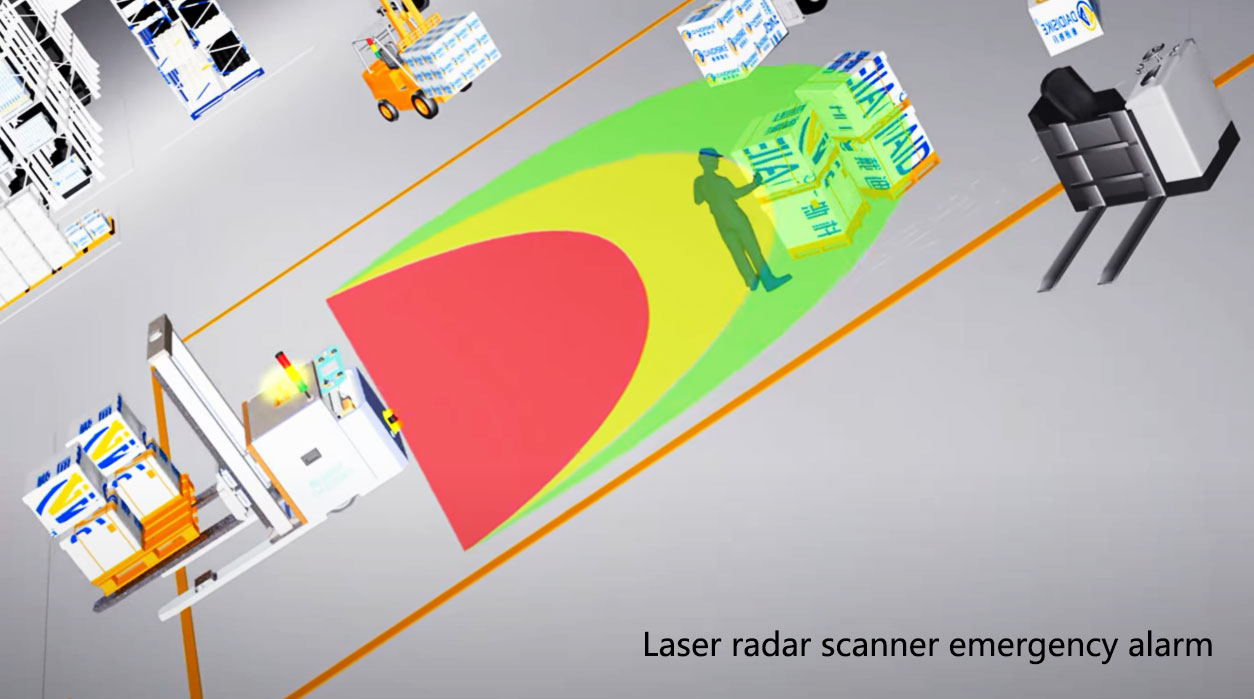
Классический 2D-LiDAR сочетает передатчик/приёмник с поворотным или колебательным механизмом для построения полярного облака точек. Ранние внедрения были сосредоточены на обнаружении препятствий и зональной защите: определить зоны защиты/предупреждения; при нарушении выдать сигнал на входы/выходы для блокировки остановки.
Контекст функциональной безопасности: LiDAR, используемые в защитных функциях, обычно проектируются в логике ISO 13849-1 (PL), IEC 61508 (SIL) и EN 62061 — оценка рисков, резервирование, диагностика и проверяемые блокировки.
Ключевые слова: 2D-LiDAR, сканирующая дальнометрия, зональная защита, охрана периметра, RS485/Modbus, функциональная безопасность
Узкие проходы, стеклянные стеллажи и сложное освещение могут вызывать дрейф или потерю, когда у вас есть только 2D + одометрия. Ответом стал многолучевой / твердотельный 3D-LiDAR в сочетании со SLAM (фронтальные признаки, замыкание контуров, бэкенд-оптимизация). Экосистема созрела: поддержка ROS/SDK, слияние нескольких датчиков (камера + LiDAR + IMU) и нативная связь с ПЛК/IPC.
Безопасность мобильных роботов: ISO 3691-4 повысил требования к обходу препятствий, ограничению скорости и аварийным остановкам на платформах AGV/AMR.
Ключевые слова: 3D-LiDAR, облако точек, SLAM, навигация AGV/AMR, ROS, ISO 3691-4
Настоящая планка — не достичь характеристик однажды, а делать это в каждую смену:
Инженерные ответы, которые ценят покупатели:
Ключевые слова: устойчивость к бликам, низкая задержка, высокая частота обновления, гибкое зонирование, степень защиты IP, надёжность, быстрая интеграция

Ключевые слова: промышленная автоматизация, навигация AGV/AMR, динамический обход препятствий, охрана периметра, EHS, зональная защита, частота ложных тревог
| Фокус | Практическая проверка | Почему это важно |
|---|---|---|
| Дальность | Подбирайте 5 / 10 / 20 / 40 м… под размер препятствия, скорость, тормозной путь | Номинальная дальность ≠ эффективная дальность обнаружения; важна отражательная способность |
| Разрешение и повторяемость | Миллиметровый класс? Работа по краям / тонким объектам | Характеристики из паспорта требуют устойчивой обработки эхо-сигналов, чтобы держаться на объекте |
| Частота обновления и сквозная задержка | ≥ 20–30 Гц для быстрого движения; минимизируйте суммарную задержку | Определяет окно реакции «увидел → затормозил» |
| Помехоустойчивость | Блики, чёрные поверхности, стекло, отражающие металлы, пыль / масляный туман | Прямое влияние на ложные / пропущенные тревоги и нагрузку обслуживания |
| Стратегия зонирования | Многозонная защита / предупреждение, экспортируемые журналы | Поддерживает аудиты EHS и прослеживаемость |
| Интерфейсы и экосистема | RS485/Modbus, цифровые входы/выходы, Ethernet, ROS/SDK | Снижает затраты на шлюзы / разработку; сокращает пусконаладку |
| Соответствие условиям | Степень защиты IP, вибрация, широкий диапазон температур (например, −10–+50 °C), стойкость к загрязнению | Определяет реальную круглосуточную работоспособность |
| Соответствие и безопасность | Лазерный Class 1; проверяемый путь блокировки | Согласуется с практиками ISO 13849-1 / IEC 61508 |
Ключевые слова: OEE, прослеживаемость данных, ремонтопригодность, контур блокировки, снижение простоев
История LiDAR — это история превращения луча света в стабильные возможности для безопасности, производительности и данных. Ожидайте дальнейших улучшений в логике эхо-сигналов, частоте кадров при меньшей мощности и более глубокого слияния со зрением и ультразвуком. Для умного производства и мобильных роботов LiDAR останется основным датчиком обзора.
Для обнаружения препятствий, зональной защиты, охраны периметра и навигации AGV/AMR мы предлагаем несколько дальностей, стандартные интерфейсы и варианты быстрой интеграции:
DLD05A3-3N / DLD20A5-5N (5 м / 20 м) — LiDAR обхода препятствий
Случаи применения: обход препятствий AGV в узких проходах, обнаружение вторжений на станциях, ближнее ограждение машин.
Особенности: высокая частота обновления, малая сквозная задержка, RS485/Modbus + цифровые входы/выходы, двойные зоны Защиты / Предупреждения (многоугольник / сектор).
5JPTG / 10JPTG (5 м / 10 м) — сканирующий дальномерный радар
Случаи применения: малые мобильные платформы, сервисные роботы, лёгкие AMR.
Особенности: разрешение миллиметрового класса, малый вес, удобные для интеграции питание и интерфейсы, SDK / протоколы для быстрой разработки.
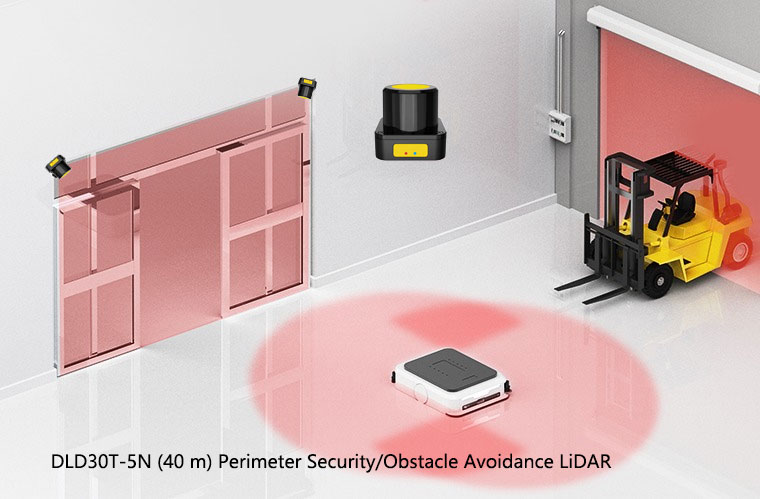
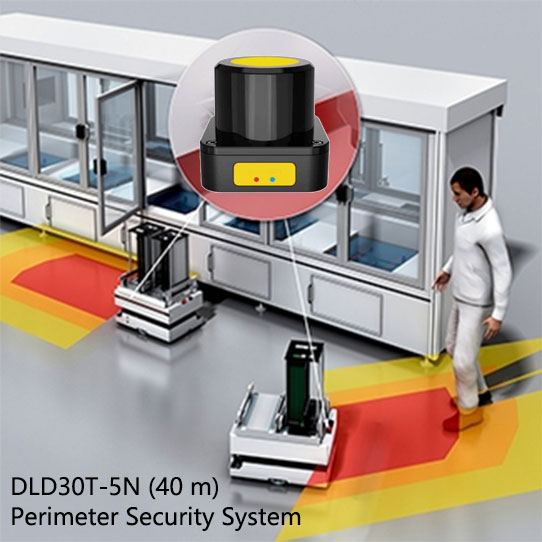
DLD30T-5N (40 м) — LiDAR охраны периметра / обхода препятствий
Случаи применения: проездные коридоры на территории / во дворе, полууличное патрулирование, дальнобойная зональная защита.
Особенности: устойчивость к бликам / отражателям, многозонная конфигурация, промышленная защита IP, экспортируемые журналы / тревоги.
Вывод одной строкой: LiDAR обхода препятствий (защитный) создан для безопасности людей и машин и предоставляет выходы с рейтингом безопасности. Навигационный LiDAR создан для картографирования и локализации, выдавая облака точек / дальности алгоритмам и не выполняет функции защитной остановки. Их роли, интерфейсы и пути подтверждения соответствия полностью различны и невзаимозаменяемы.
| Измерение | Обход препятствий (защитный LiDAR) | Навигация (SLAM / картографический LiDAR) |
|---|---|---|
| Основное назначение | Безопасность персонала / оборудования: вход в защитное или предупредительное поле вызывает блокировку, замедление или аварийную остановку | Построение карт, локализация и планирование маршрутов; предоставление исходных данных алгоритмам обхода / планирования |
| Формат вывода | Двухканальный OSSD, безопасный Ethernet, биты статуса зон; встроенная логика зон и самодиагностика | Облако точек / дальность / интенсивность (Ethernet / последовательный порт); обрабатывается навигационными стеками верхнего уровня (например, ROS) |
| Соответствие и уровень безопасности | Спроектирован и оценён для применений безопасности (типовая цель: функции безопасности на уровне PL d / SIL 2) | Без рейтинга функции безопасности; не используется напрямую для защитной остановки |
| Инженерные показатели | Время отклика безопасности, отказобезопасное поведение, охват диагностики, переключение зон, устойчивость к отражениям / пыли / высокой освещённости | Угловое разрешение, частота сканирования, дальность, согласованность облака точек, устойчивость к дрейфу и замыканию контуров |
| Архитектура системы | Напрямую блокируется с цепями торможения / защитным ПЛК; поддерживает блокировки EDM / автоматический сброс | Алгоритмы вычисляют команды движения; уровень управления выдаёт скорость / маршрут после восприятия |
| Типовое размещение | Низко / по периметру, чтобы покрыть зоны риска входа человека | Высокий или угловой монтаж для полного охвата окружения |
| Типовые случаи применения | Ограждение AMR / AGV, дооснащение погрузчиков, охрана периметра опасных зон, ограждение машин | SLAM-картографирование, локализация, планирование маршрутов, движение по узким проходам, глобальный обход препятствий |

Установите защитный LiDAR низко спереди; настройте защитные / предупредительные поля и зоны скорости; блокируйте напрямую с цепью торможения для покрытия фронтального и диагонального входа.
Установите навигационный LiDAR сверху или по углам; подавайте облака точек в SLAM / локализацию и планирование для коридоров, поворотов и узких проходов.
Уровень безопасности имеет наивысший приоритет. Навигационный уровень управляет только скоростью / маршрутом; как только срабатывает триггер безопасности, машина должна перейти в безопасное состояние.
В1: Может ли один LiDAR выполнять и навигацию, и безопасность?
О: Не рекомендуется. Цели, интерфейсы и соответствие различаются. Инженерная практика использует разделённую схему: защитный LiDAR (блокируемая остановка) + навигационный LiDAR (картографирование / локализация), чтобы снизить риски соответствия и обслуживания.
В2: Как быть с чёрными объектами или стеклянными дверями, которые трудно обнаружить?
О: Увеличьте разрешение или время интегрирования; измените угол падения на 5–10°; примените антибликовую плёнку или выберите модели большей мощности; всегда проверяйте на образцах материалов худшего случая.
В3: Как определить размер защитного и предупредительного полей?
О: Рассчитайте минимальное защитное поле по максимальной скорости, суммарной задержке системы и тормозной способности; оставьте запас 20–40 % в качестве предупредительного поля для настройки и дрейфа окружающих условий.
В4: Нужна ли повторная приёмка после смены моделей?
О: Если модель датчика или логика зон изменяется, повторно проверьте остановку на максимальной скорости и границы полей, а также сохраните параметры и журналы, чтобы убедиться, что функция безопасности не затронута.

