
DLD05A3-3N / DLD20A5-5N Radar láser anticolisión de 5 m/20 m

Convirtiendo el acto de “ver el mundo” en una capacidad de ingeniería, el LiDAR ha recorrido más de medio siglo: de los prototipos de investigación a sensores imprescindibles para la automatización industrial, la navegación AGV/AMR, la evitación de obstáculos en robótica, la seguridad perimetral y la protección de zonas. Esta cronología explica cómo ha llegado hasta aquí la tecnología y responde a la pregunta práctica que más importa a compradores y operadores: ¿puede mantenerse estable en la línea de producción?
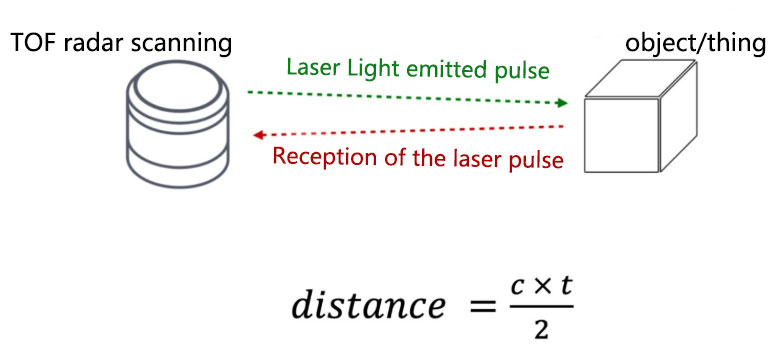
El tiempo de vuelo (TOF) hizo práctica la medición óptica de distancia: emitir un pulso láser, medir el tiempo de ida y vuelta Δt y estimar la distancia como c·Δt/2. Los primeros instrumentos eran voluminosos y consumían mucha energía, destinados sobre todo a la defensa y la ciencia. Tomaron forma componentes básicos esenciales: láseres semiconductores, fotodetectores (APD/SiPM) y la conformación de pulsos. Para convertir mediciones puntuales en barridos, los ingenieros desarrollaron mecanismos ópticos repetibles: espejos giratorios, galvanómetros y escáneres poligonales.
Referencia de seguridad: los productos cumplen la norma IEC 60825-1 sobre seguridad ocular láser; la mayoría de los LiDAR industriales apuntan a la Clase 1.
Palabras clave: medición láser de distancia, TOF, láser pulsado, barrido por espejo giratorio, fotodetección, IEC 60825-1
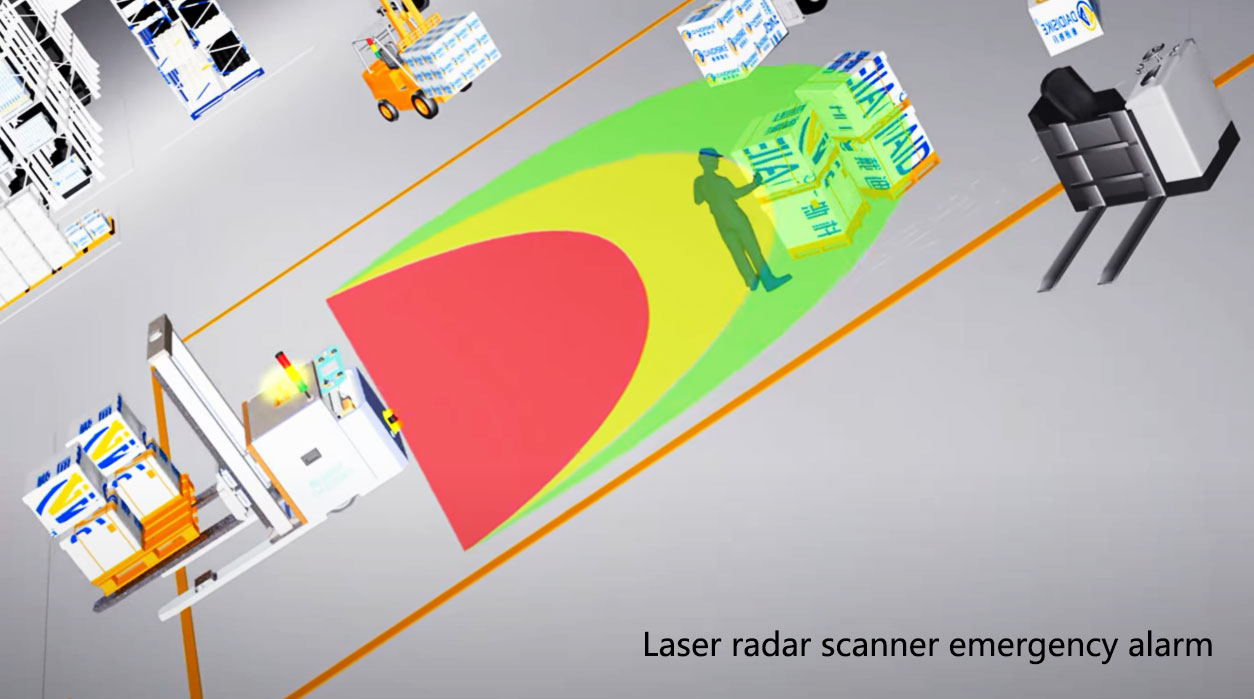
Un LiDAR 2D clásico combina un transmisor/receptor con un mecanismo rotatorio u oscilante para construir una nube de puntos polar. Las primeras implementaciones se centraron en la detección de obstáculos y la protección de zonas: definir áreas de protección/advertencia; si se vulneran, emitir una señal de E/S para enclavar una parada.
Contexto de seguridad funcional: los LiDAR utilizados en funciones de protección suelen diseñarse con el enfoque de la ISO 13849-1 (PL), la IEC 61508 (SIL) y la EN 62061: evaluación de riesgos, redundancia, diagnósticos y enclavamientos verificables.
Palabras clave: LiDAR 2D, medición de distancia por barrido, protección de zonas, seguridad perimetral, RS485/Modbus, seguridad funcional
Los pasillos estrechos, las estanterías de vidrio y la iluminación difícil pueden provocar deriva o pérdida cuando solo se dispone de 2D + odometría. La respuesta fue el LiDAR 3D multihaz / de estado sólido junto con SLAM (características de front-end, cierre de bucle, optimización de back-end). El ecosistema maduró: compatibilidad con ROS/SDK, fusión de múltiples sensores (cámara + LiDAR + IMU) y comunicaciones nativas con PLC/IPC.
Seguridad de los robots móviles: la ISO 3691-4 elevó las expectativas en cuanto a la evitación de obstáculos, los límites de velocidad y las paradas de emergencia en plataformas AGV/AMR.
Palabras clave: LiDAR 3D, nube de puntos, SLAM, navegación AGV/AMR, ROS, ISO 3691-4
El verdadero reto no es cumplir las especificaciones una vez, sino hacerlo en cada turno:
Respuestas de ingeniería que valoran los compradores:
Palabras clave: inmunidad a los reflejos, baja latencia, alta frecuencia de actualización, zonificación flexible, grado IP, fiabilidad, integración rápida

Palabras clave: automatización industrial, navegación AGV/AMR, evitación dinámica de obstáculos, seguridad perimetral, EHS, protección de zonas, tasa de falsas alarmas
| Aspecto | Comprobación pragmática | Por qué importa |
|---|---|---|
| Alcance | Ajuste 5 / 10 / 20 / 40 m… al tamaño del obstáculo, la velocidad y la distancia de frenado | El alcance nominal ≠ la distancia de detección efectiva; la reflectividad importa |
| Resolución y repetibilidad | ¿Del orden del milímetro? Rendimiento en bordes / objetos finos | Las especificaciones de la hoja de datos necesitan un procesamiento de ecos robusto para mantenerse en campo |
| Frecuencia de actualización y latencia de extremo a extremo | ≥ 20-30 Hz para movimientos rápidos; minimizar la latencia total | Define la ventana de reacción “ver → frenar” |
| Inmunidad a interferencias | Reflejos, superficies negras, vidrio, metales reflectantes, polvo / neblina de aceite | Impacto directo en las falsas alarmas / detecciones fallidas y en la carga de mantenimiento |
| Estrategia de zonificación | Protección / advertencia multizona, registros exportables | Facilita las auditorías de EHS y la trazabilidad |
| Interfaces y ecosistema | RS485/Modbus, E/S digital, Ethernet, ROS/SDK | Reduce los costes de pasarela / desarrollo; acorta la puesta en marcha |
| Idoneidad del entorno | Grado IP, vibración, amplio rango de temperatura (p. ej. −10 a +50 °C), antisuciedad | Determina el tiempo de actividad real 24/7 |
| Conformidad y seguridad | Láser Clase 1; ruta de enclavamiento verificable | Se alinea con las prácticas de la ISO 13849-1 / IEC 61508 |
Palabras clave: OEE, trazabilidad de datos, mantenibilidad, bucle de enclavamiento, reducción del tiempo de inactividad
La historia del LiDAR es la historia de convertir un haz de luz en capacidades estables de seguridad, productividad y datos. Cabe esperar avances continuos en la lógica de ecos, mayores tasas de fotograma con menor consumo y una fusión más profunda con la visión y los ultrasonidos. Para la fabricación inteligente y los robots móviles, el LiDAR seguirá siendo un sensor de visión principal.
Para la detección de obstáculos, la protección de zonas, la seguridad perimetral y la navegación AGV/AMR, ofrecemos múltiples alcances, interfaces estándar y opciones de integración rápida:
DLD05A3-3N / DLD20A5-5N (5 m / 20 m) — LiDAR anticolisión
Casos de uso: evitación de obstáculos en AGV de pasillo estrecho, detección de intrusión en estaciones, protección de máquinas en campo cercano.
Aspectos destacados: alta frecuencia de actualización, baja latencia de extremo a extremo, RS485/Modbus + E/S digital, zonas duales de protección / advertencia (polígono / abanico).
5JPTG / 10JPTG (5 m / 10 m) — Radar telémetro de barrido
Casos de uso: pequeñas plataformas móviles, robots de servicio, AMR de trabajo ligero.
Aspectos destacados: resolución del orden del milímetro, peso ligero, alimentación e interfaces de fácil integración, SDK / protocolos para un desarrollo rápido.
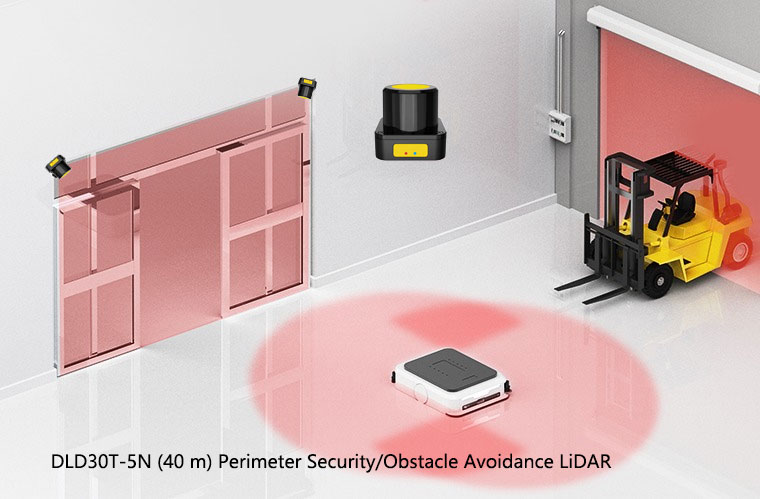
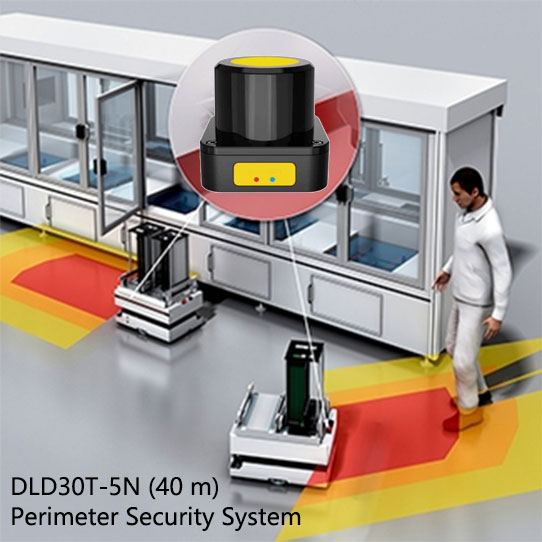
DLD30T-5N (40 m) — LiDAR de seguridad perimetral / anticolisión
Casos de uso: canales de recinto / patio, patrulla semiexterior, protección de zonas de largo alcance.
Aspectos destacados: inmunidad a reflejos / reflectores, configuración multizona, protección IP industrial, registros / alarmas exportables.
Conclusión en una línea: un LiDAR anticolisión (de seguridad) está diseñado para la seguridad de las personas y las máquinas y proporciona salidas con certificación de seguridad. Un LiDAR de navegación está diseñado para el mapeo y la localización, entregando nubes de puntos / distancias a los algoritmos y no realiza funciones de parada de seguridad. Sus funciones, interfaces y rutas de conformidad son completamente diferentes y no intercambiables.
| Dimensión | Anticolisión (LiDAR de seguridad) | Navegación (LiDAR SLAM / de mapeo) |
|---|---|---|
| Propósito principal | Seguridad del personal / los equipos: la entrada en un campo de protección o de advertencia activa el enclavamiento, la deceleración o la parada de emergencia | Construir mapas, localizar y planificar rutas; proporcionar datos en bruto a los algoritmos de evitación / planificación |
| Formato de salida | OSSD de doble canal, Ethernet de seguridad, bits de estado de zona; lógica de zonas a bordo y autodiagnóstico | Nube de puntos / distancia / intensidad (Ethernet / serie); procesado por pilas de navegación de capa superior (p. ej. ROS) |
| Conformidad y nivel de seguridad | Diseñado y evaluado para aplicaciones de seguridad (objetivo típico: funciones de seguridad de nivel PL d / SIL 2) | Sin certificación de función de seguridad; no se utiliza directamente para la parada de seguridad |
| Métricas de ingeniería | Tiempo de respuesta de seguridad, comportamiento a prueba de fallos, cobertura de diagnóstico, conmutación de zonas, inmunidad a reflejos / polvo / alta luz ambiental | Resolución angular, frecuencia de barrido, alcance, consistencia de la nube de puntos, robustez frente a deriva y cierre de bucle |
| Arquitectura del sistema | Se enclava directamente con los circuitos de frenado / PLC de seguridad; admite enclavamientos EDM / de rearme automático | Los algoritmos calculan los comandos de movimiento; la capa de control emite la velocidad / ruta tras la percepción |
| Ubicación típica | Montaje bajo / perimetral para cubrir las zonas de riesgo de ingreso de personas | Montaje alto o en esquina para una cobertura completa del entorno |
| Aplicaciones típicas | Protección de AMR / AGV, retrofits de carretillas elevadoras, protección perimetral de zonas peligrosas, protección de máquinas | Mapeo SLAM, localización, planificación de rutas, recorrido de pasillos estrechos, evitación global de obstáculos |

Monte un LiDAR de seguridad en posición baja en la parte delantera; configure campos de protección / advertencia y zonas de velocidad; enclave directamente con la cadena de frenado para cubrir el ingreso frontal y diagonal.
Monte un LiDAR de navegación en la parte superior o en las esquinas; alimente las nubes de puntos al SLAM / la localización y la planificación para corredores, giros y pasillos estrechos.
La capa de seguridad tiene la máxima prioridad. La capa de navegación solo gestiona la velocidad / ruta; una vez que se produce un disparo de seguridad, el vehículo debe entrar en un estado seguro.
P1: ¿Puede un solo LiDAR hacer tanto navegación como seguridad?
R: No se recomienda. Los objetivos, las interfaces y la conformidad difieren. La práctica de ingeniería utiliza un esquema separado: LiDAR de seguridad (parada con enclavamiento) + LiDAR de navegación (mapeo / localización) para reducir los riesgos de conformidad y mantenimiento.
P2: ¿Qué hay de los objetos negros o las puertas de vidrio difíciles de detectar?
R: Aumente la resolución o el tiempo de integración; ajuste el ángulo de incidencia entre 5 y 10°; aplique película antirreflejos o elija modelos de mayor potencia; valide siempre con muestras de material en el peor de los casos.
P3: ¿Cómo dimensiono los campos de protección frente a los de advertencia?
R: Calcule el campo de protección mínimo a partir de la velocidad máxima, el retardo total del sistema y la capacidad de frenado; mantenga un margen del 20 al 40 % como campo de advertencia para el ajuste y la deriva ambiental.
P4: ¿Necesito una nueva validación tras cambiar de modelo?
R: Si cambia el modelo del sensor o la lógica de zonas, vuelva a probar la parada a velocidad máxima y los límites de los campos, y archive los parámetros y los registros para garantizar que la función de seguridad no se ve afectada.

