
ISO 10218 is the standard pair that the whole robot-integration world builds on. Part 1 has always been about the robot itself; Part 2 about the system around it — the cell, the application, the safeguarding. For years the working copies everyone cited were a decade old, with ISO/TS 15066 bolted on beside them to handle collaborative robots. In 2025 that changed: the series was revised and re-published, and 2026 is the year integrators actually have to work to it.
The revision is worth understanding properly, because a couple of the changes alter how you scope a cell — and one of them quietly clears up a misconception that has cost integrators real money.
One series, no cobot exception
The headline change: ISO/TS 15066 — the technical specification that defined collaborative operation, including the biomechanical contact-force limits — has been absorbed into ISO 10218-2:2025. Collaborative workspace requirements now live inside the main system standard rather than in a separate document beside it.
The consequence is conceptual but important. There is no longer a separate “collaborative robot” category of machine that gets its own rulebook. A robot is a robot. Whether an application ends up power-and-force-limited, speed-and-separation-monitored, or simply fenced with interlocked access is now an output of one task-based risk assessment, not a decision you make by buying a robot labelled “collaborative.” That is the right way round. We have seen too many cells where a cobot was bought, the word “collaborative” was treated as a substitute for a risk assessment, and the safeguarding was thin as a result.
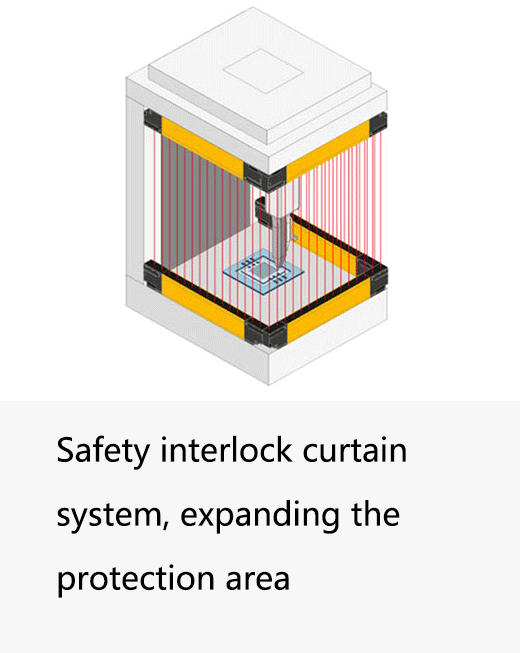
Safeguarding: light curtains and scanners, by assessment
The revised standard does not invent a new safeguarding technology. It keeps the established set — fixed and interlocked physical barriers, light curtains, safety laser scanners and safety mats — and reinforces that the choice between them, and the mounting distance, must come out of the task-based risk assessment and the ISO 13855 safety-distance calculation.
For the protective-device side that is reassuring continuity. A light curtain used on a robot cell is electro-sensitive protective equipment built to IEC 61496, applied to the robot application under IEC 62046. It creates a vertical plane of infrared beams across a defined access opening; break a beam and the safety outputs drop, sending a stop command to the cell. It is a mature, well-understood device, and the 2025 revision keeps it firmly in scope.
Light curtain, scanner, or both
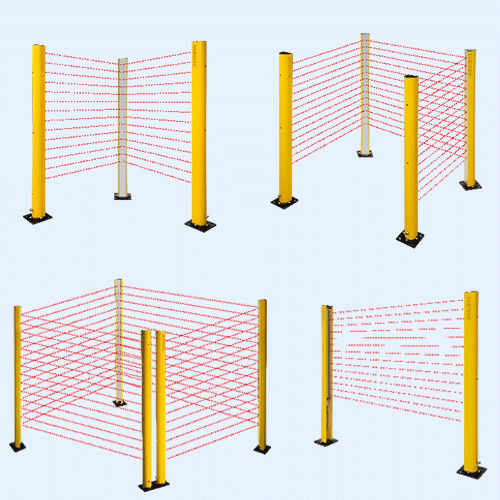
The standard expects the safeguarding to match the actual access routes, and that usually means combining devices rather than choosing one. The two are not interchangeable:
- A light curtain guards a defined opening — a fixed plane the operator passes through to load, unload or enter. It is precise, fast, and ideal where the access point is well-defined.
- A safety laser scanner guards an area — it monitors a horizontal floor zone, supports a warning field ahead of a protective field, and suits cells with an open footprint or where the robot or an AGV moves through changing space.
A great many robot cells use both: light curtains on the load and unload openings where the geometry is fixed, and an area scanner covering the walk-in floor zone where someone could step in from the side. ISO 10218-2 pushes you toward that kind of layered answer, because a single device rarely covers every way a person can reach the hazard.

The integration trap: a compliant robot is not a compliant cell
This is the part that costs people money, so it is worth stating plainly. ISO 10218-1 covers the robot as a product — the arm and controller the robot manufacturer ships. ISO 10218-2 covers the robot system: the application, the cell, the integration. They are different scopes.
A robot that is fully compliant to Part 1, dropped into a cell with inadequate safeguarding, gives you a non-compliant cell. And for CE marking it is the integrated workcell that is placed on the market — so a poor installation invalidates the CE marking of the whole cell no matter how good the robot is. Compliance is earned at the integration. It is not inherited from the robot, and it is not conferred by the word “collaborative” on the datasheet. The 2025 revision does not soften this; if anything it makes the system-level responsibility clearer.
What integrators should do in 2026
- Obtain both parts of the 2025 edition and have whoever signs off cell safety read them properly — not skim the summary.
- Re-base your standard risk-assessment template and safeguarding checklist on the new text, including the now-integrated collaborative requirements.
- Check the harmonised-standards position for your market so you know when the 2025 edition gives presumption of conformity.
- Treat existing cells as fine until a substantial modification pulls them up to current expectations — then plan upgrades deliberately.
- Keep specifying compliant devices: Type 4 light curtains to IEC 61496 and safety laser scanners remain the workhorses of robot-cell safeguarding.
None of this is a reason to slow robot deployment. The 2025 ISO 10218 revision is, on balance, a tidy-up: one coherent series, the collaborative rules where they belong, and a clear message that the cell — not the robot — is where safety is proven. For anyone who already designs cells around a real risk assessment and properly mounted light curtains and scanners, it mostly confirms good practice. For anyone who treated “collaborative” as a shortcut, it closes the shortcut.
Related reading
Light Curtain vs Scanner for Robot Cells
Perimeter plane versus area zone — how to choose for a robot workcell.
DAIDISIKE DQSA Area Light Curtain
Area / body-detection protective light curtain for cell access guarding.
Safety Scanner Zone Configuration
Warning fields, protective fields and teach-in for area scanners.